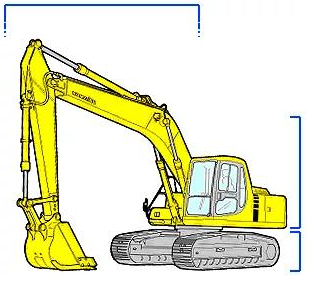
ໂຄງສ້າງພື້ນຖານຂອງການຂຸດຄົ້ນແບ່ງອອກເປັນ:
1. ພາກສ່ວນ undercarriage;
2. ສ່ວນຂອງຮ່າງກາຍ;
3. ພາກສ່ວນອຸປະກອນເຮັດວຽກ.
ອຸປະກອນເຮັດວຽກ:
-boom, stick, bucket, ທໍ່ໄຮໂດຼລິກ, rod ເຊື່ອມຕໍ່, pin, pipeline.
ພາກສ່ວນຂອງຮ່າງກາຍ
- ເຄື່ອງຈັກ, ເຄື່ອງດູດຊ໊ອກປັ໊ມຕົ້ນຕໍ, ປ່ຽງຕົ້ນຕໍ, cab, ກົນໄກການ slewing, slewing bearing, slewing ຮ່ວມ, turntable, tank ນ້ໍາມັນໄຮໂດຼລິກ, tank ນໍ້າມັນເຊື້ອໄຟ, ວົງຈອນນ້ໍາມັນຄວບຄຸມ, ອົງປະກອບໄຟຟ້າ, counterweight.
ພາກສ່ວນ Chassis – ກອບຕິດຕາມ, ຕິດຕາມ, idler, roller, idler, ໄດສຸດທ້າຍ, ອຸປະກອນ tensioning.
ພາກສ່ວນຂອງຮ່າງກາຍ
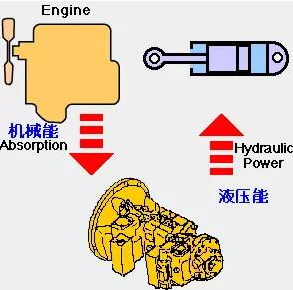
ເຄື່ອງຈັກ - ແຫຼ່ງພະລັງງານຂອງເຄື່ອງຈັກ, ປ່ຽນພະລັງງານຄວາມຮ້ອນທີ່ເກີດຈາກການເຜົາໃຫມ້ຂອງນໍ້າມັນເຊື້ອໄຟເປັນພະລັງງານກົນຈັກໂດຍຜ່ານກົນໄກການເຊື່ອມ crankshaft.
ປັ໊ມຕົ້ນຕໍແມ່ນເຊື່ອມຕໍ່ກັບ flywheel ຂອງເຄື່ອງຈັກໂດຍຜ່ານເຄື່ອງດູດຊ໊ອກ, ແລະປ່ຽນຜົນຜະລິດພະລັງງານກົນຈັກໂດຍ flywheel ເຂົ້າໄປໃນການໄຫຼຂອງນ້ໍາມັນທີ່ມີຄວາມກົດດັນສູງ, ນັ້ນແມ່ນ, ພະລັງງານໄຮໂດຼລິກ.
ປ່ຽງຫຼັກ
- ແບ່ງຜົນຜະລິດນ້ໍາມັນແຮງດັນສູງໂດຍປັ໊ມຕົ້ນຕໍຕາມຄວາມຕ້ອງການຂອງການປະຕິບັດຂອງອຸປະກອນທີ່ເຮັດວຽກ, ເພື່ອຮັບຮູ້ການປະຕິບັດທີ່ແຕກຕ່າງກັນຂອງອຸປະກອນທີ່ເຮັດວຽກ.
ກົນໄກ Slewing – ມັນແມ່ນປະກອບດ້ວຍມໍເຕີ slewing ແລະກົນໄກການຫຼຸດຜ່ອນການ slewing, ເຊິ່ງ meshes ກັບ slewing bearing ເພື່ອສໍາເລັດການກະທໍາ slewing ຂອງເຄື່ອງໃນທຸກມຸມ.
ນ້ຳໜັກໂຕ
- ເຮັດໃຫ້ຈຸດສູນກາງຂອງແຮງໂນ້ມຖ່ວງຂອງເຄື່ອງຈັກໃກ້ຊິດເທົ່າທີ່ເປັນໄປໄດ້ກັບຈຸດສູນກາງຂອງການຫມຸນຂອງຮ່າງກາຍລົດເພື່ອຮັບປະກັນຄວາມຫມັ້ນຄົງແບບເຄື່ອນໄຫວຂອງຕົວລົດ, ຫຼຸດຜ່ອນຄວາມຕ້ານທານການຫມຸນຂອງລູກປືນ slewing, ແລະບັນລຸການຫມຸນໄວແລະຫມັ້ນຄົງ.
ສູນລວມ rotary
- ເມື່ອເຄື່ອງຈັກຫມຸນໄປໃນທິດທາງໃດກໍ່ຕາມ, ການໄຫຼຂອງນ້ໍາມັນໄຮໂດຼລິກຂອງຮ່າງກາຍສ່ວນເທິງໄດ້ຖືກສະຫນອງຢ່າງຕໍ່ເນື່ອງໃຫ້ກັບມໍເຕີເດີນທາງຢູ່ສ່ວນລຸ່ມຂອງຮ່າງກາຍໂດຍຜ່ານຊ່ອງທາງນ້ໍາມັນຫມຸນພາຍໃນ, ແລະແຕ່ລະຊ່ອງນ້ໍາມັນພາຍໃນ rotary ແມ່ນຕ້ານການສວມໃສ່. ປະສິດທິພາບທີ່ດີແລະປະທັບຕາທີ່ທົນທານຕໍ່ຄວາມກົດດັນສູງແມ່ນແຍກອອກ.

ລົດແທັກຊີ້
– ພາຍໃນມີຈໍຕິດ, ສະຫຼັບໄຟຟ້າ, ແຜງຄວບຄຸມ, ເຄື່ອງປັບອາກາດ ແລະວິທະຍຸ ແລະ ອື່ນໆ, ບ່ອນນັ່ງຜູ້ຂັບຂີ່ສາມາດປັບໄດ້ຕາມຄວາມຕ້ອງການຂອງຜູ້ຂັບຂີ່..
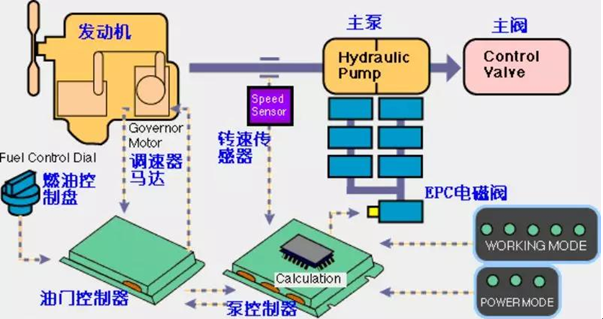
ລະບົບຄວບຄຸມໄຟຟ້າ
ການຄວບຄຸມແບບປະສົມປະສານຂອງປັ໊ມຕົ້ນຕໍແລະເຄື່ອງຈັກເພື່ອບັນລຸການຈັບຄູ່ພະລັງງານແລະການປະຫຍັດນໍ້າມັນ
ການເພີ່ມພະລັງງານໄວ
ການເລືອກຮູບແບບການເຮັດວຽກ
ໂໝດແຕະລົງ
ໂໝດ downshift ອັດຕະໂນມັດ
ການເລືອກຄວາມໄວໃນການຍ່າງ
ຟັງຊັນເບກ swing
ເຄື່ອງຈັກອັດຕະໂນມັດການອົບອຸ່ນຂຶ້ນແລະຫນ້າທີ່ປ້ອງກັນຄວາມຮ້ອນເກີນ
ພາກສ່ວນອຸປະກອນເຮັດວຽກ

ກະບອກສູບບູມ
- ສອງກະບອກໄດ້ຖືກຕິດຕັ້ງຢູ່ທັງສອງດ້ານຂອງ boom ເພື່ອປັບລະດັບຄວາມສູງຂອງການຂຸດເຈາະແລະຄວາມເລິກຂອງການເຮັດວຽກຂອງເຄື່ອງຈັກໂດຍຜ່ານການເຄື່ອນໄຫວ telescopic ຂອງເຂົາເຈົ້າ.
ໄມ້ກະບອກ
- ຕິດຕັ້ງຢູ່ສ່ວນເທິງຂອງ boom, ໂດຍຜ່ານການເຄື່ອນໄຫວ telescopic ຂອງຕົນເພື່ອຮັບຮູ້ການເຄື່ອນໄຫວທາງຫນ້າແລະຫລັງຂອງໄມ້ (forearm), ປະຕິບັດການຂຸດຄົ້ນຫຼື unloading ຂອງ stick ໄດ້.
ຖັງນໍ້າມັນ
- ຕິດຕັ້ງຢູ່ສ່ວນເທິງຂອງໄມ້ ( forearm), ໂດຍຜ່ານການເຄື່ອນໄຫວ telescopic ຂອງຕົນ, ການປະຕິບັດການຂຸດຄົ້ນ bucket ແລະ unloading ໄດ້ຖືກຮັບຮູ້.
ອຸປະກອນເຮັດວຽກທັງຫມົດຈໍາເປັນຕ້ອງໄດ້ຜ່ານການດໍາເນີນການປະສົມຂອງແຕ່ລະອຸປະກອນການເຮັດວຽກໃນຂະບວນການປະຕິບັດງານ, ດັ່ງນັ້ນເພື່ອຮັບຮູ້ການປະຕິບັດຫນ້າທີ່ໄວ, ປະຫຍັດເວລາແລະປະສິດທິພາບສູງ.
ພາກສ່ວນ undercarriage
ຂອບຕິດຕາມ (X frame) -
ໂຄງສ້າງຕົ້ນຕໍຂອງພາກສ່ວນ chassis, ເຊື່ອມຕໍ່ສາຍແອວສີ່ລໍ້ຂອງພາກສ່ວນຍ່າງ, ສະຫນັບສະຫນູນຮ່າງກາຍຂອງລົດໄດ້ກ້ຽງແລະ realizing ການຍ່າງຂອງເຄື່ອງຈັກ.
ມ້ວນ
- ຮອງຮັບ ແລະ ກະຈາຍນ້ຳໜັກຂອງເຄື່ອງໄດ້ສະເໝີກັນ ຢູ່ເທິງໜ້າດິນ.
ສະຫນັບສະຫນູນ rollers
– ຖືຕົວກວາດເວັບເທິງທີ່ໝຸນຂຶ້ນເພື່ອໃຫ້ຕົວກວາດເວັບທັງໝົດສາມາດໝຸນໄດ້ຢ່າງຄ່ອງແຄ້ວ.
ເກີບຕິດຕາມ
- ແຈກຢາຍນ້ຳໜັກຂອງເຄື່ອງລົງພື້ນໃຫ້ສະເໝີກັນ ແລະຮັບຮູ້ການເຄື່ອນທີ່ຂອງເຄື່ອງດ້ວຍການໝູນວຽນຂອງຕົນເອງ;ການເພີ່ມພື້ນທີ່ຕິດຕໍ່ກັບຫນ້າດິນສາມາດຫຼຸດຜ່ອນຄວາມກົດດັນສະເພາະຂອງຫນ້າດິນ, ດັ່ງນັ້ນເຄື່ອງສາມາດຍ່າງເທິງພື້ນດິນທີ່ອ່ອນໆເຊັ່ນ swamps ແລະເຮັດວຽກ;ອີງຕາມຄວາມຕ້ອງການ, ຜູ້ໃຊ້ສາມາດເລືອກທີ່ຈະເປີດກວ້າງເກີບຕິດຕາມຫຼື lengthen ຕິດຕາມ.
ລໍ້ idler
— ເຊື່ອມຕໍ່ກັບກະບອກຄວາມເຄັ່ງຕຶງແລະພາກຮຽນ spring tensioning ເພື່ອເຄັ່ງຄັດຂອງການຕິດຕາມແລະເຮັດໃຫ້ຄວາມເຄັ່ງຕຶງຕິດຕາມທີ່ເຫມາະສົມ;ໃນເວລາທີ່ທາງຫນ້າຂອງຕິດຕາມໄດ້ຮັບຜົນກະທົບຈາກຜົນບັງຄັບໃຊ້ພາຍນອກ, ຜົນບັງຄັບໃຊ້ຜົນກະທົບແມ່ນຖືກສົ່ງໄປຫາພາກຮຽນ spring tensioning ຜ່ານລໍ້ຄູ່ມືສໍາລັບການ buffering.ປ້ອງກັນຄວາມເສຍຫາຍຕິດຕາມ.
ຂັບສຸດທ້າຍ
- ລວມໄປເຖິງມໍເຕີເຄື່ອນທີ່ ແລະ ກົນໄກການເລັ່ງຄວາມໄວໃນການເດີນທາງ, ເປັນລໍ້ຂັບເຄື່ອນເພື່ອສະຫນອງພະລັງງານໃຫ້ເຄື່ອງຈັກໃນການເດີນທາງ, ປ່ຽນພະລັງງານໄຮໂດຼລິກເປັນພະລັງງານກົນຈັກຜ່ານມໍເຕີເດີນທາງ, ເລັ່ງຜ່ານກົນໄກການຊ້າຂອງເກຍ, ເພີ່ມແຮງບິດ, ແລະຂັບຕິດຕາມການຫມຸນ. ໂດຍ sprocket ເພື່ອຮັບຮູ້ເຄື່ອງ.ຍ່າງ
ເວລາປະກາດ: 23-06-2022



